Comunicació de processos
Unitat 3 · Sistemes Operatius (SO)
Repàs de gestió de processos
echo "Missatge enviat" > missatge.txt
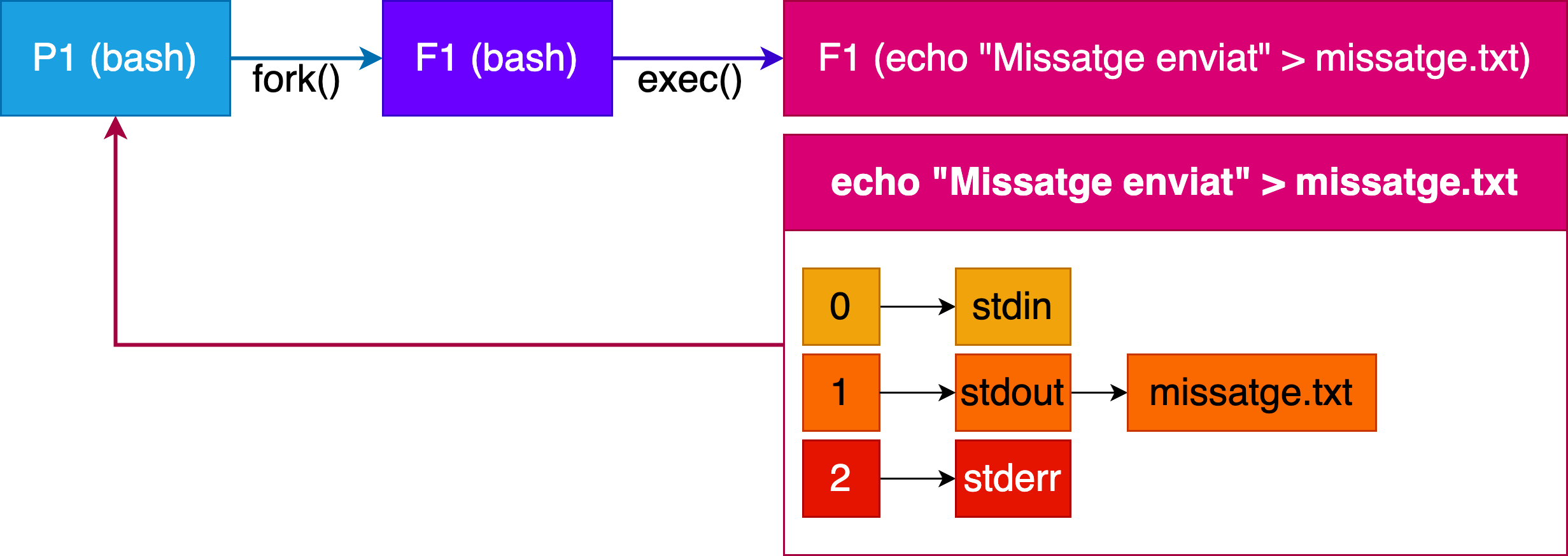
Exercici
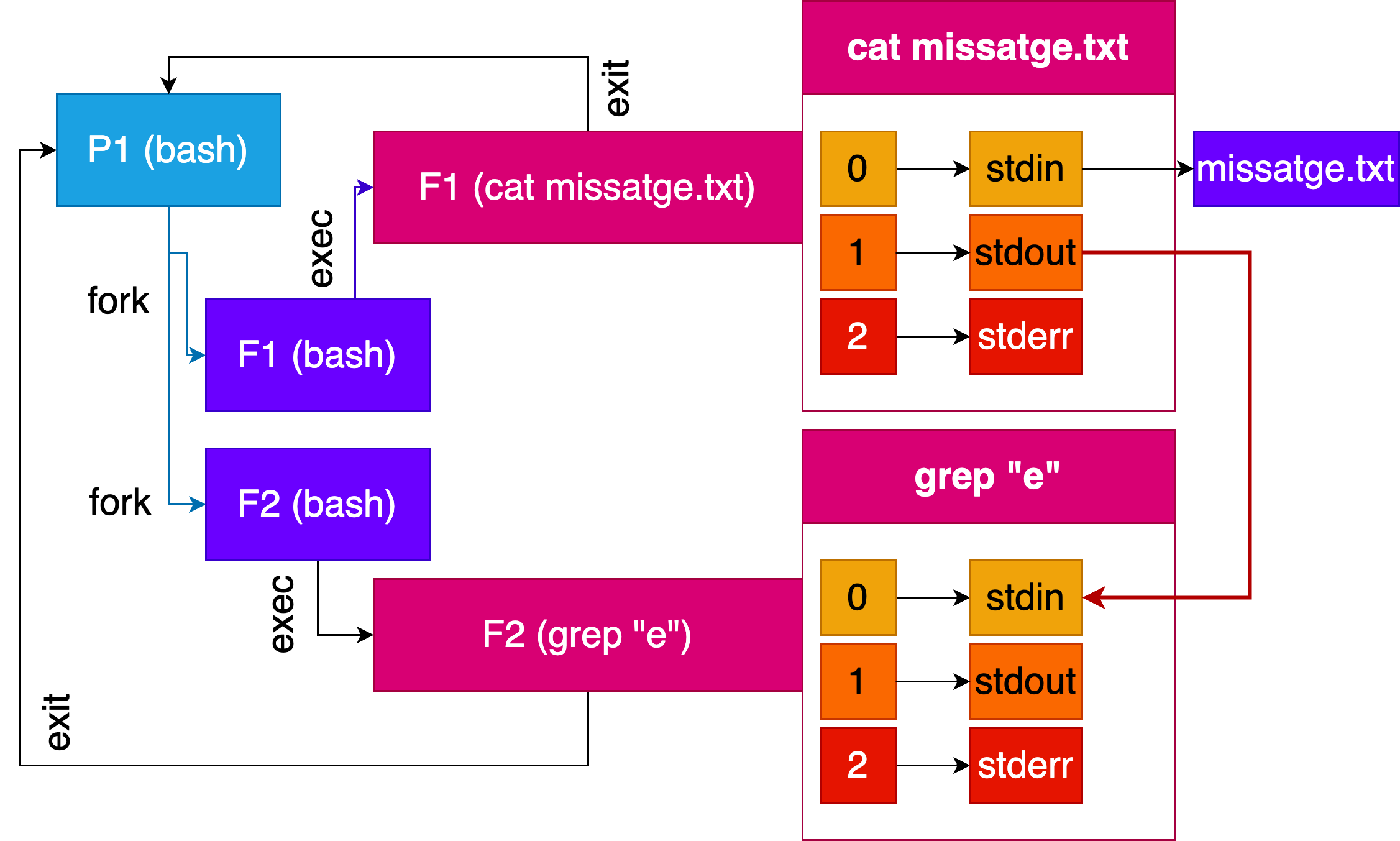
Implementeu un programa en C que simuli aquest comportament.
cat < missatge.txt | grep "e"
Exemple: Cua d’impressió
- El procés A llegeix la variable in i escriu el valor 7 en una variable local (next_free_slot).
- El SO interromp el procés A i executa el procés B.
- El procés B llegeix la variable in i escriu el valor 7 en una variable local (next_free_slot).
- El procés B col·loca un fitxer a la cua d’impressió al slot 7 i el servei d’impressió modifica les variables in i out.
- El procés B realitza altres tasques no relacionades amb la cua d’impressió.
- El SO interromp el procés B i executa el procés A. El procés A utilitza la seva variable local (next_free_slot) per a escriure el fitxer a la cua d’impressió. El fitxer s’escriu al slot 7, i també actualitza les variables in i out.
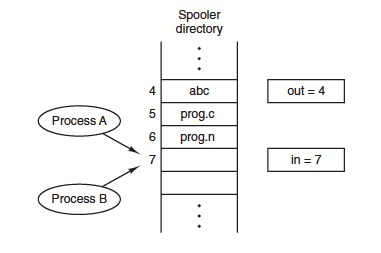
- El procés B ha perdut la impressió del fitxer. El procés A l’ha sobrescrit.
- El servei d’impressió no ha notat cap inconsistencia en les variables in i out.
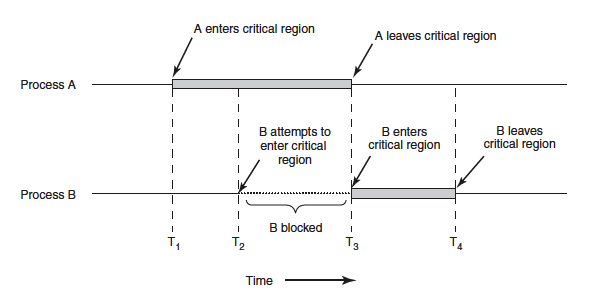
Evitar les condicions de carrera
La secció crítica és la part del codi on s’accedeix a recursos compartits. Per a evitar les condicions de carrera, els processos han de complir les següents condicions:
- Dos processos no poden estar simultàniament en la secció crítica.
- No s’ha d’assumir que els processos són executats de forma ràpida o lenta.
- Cap procés que no estigui en la secció crítica pot bloquejar altres processos.
- Cap procés ha d’esperar per sempre per entrar a la secció crítica.
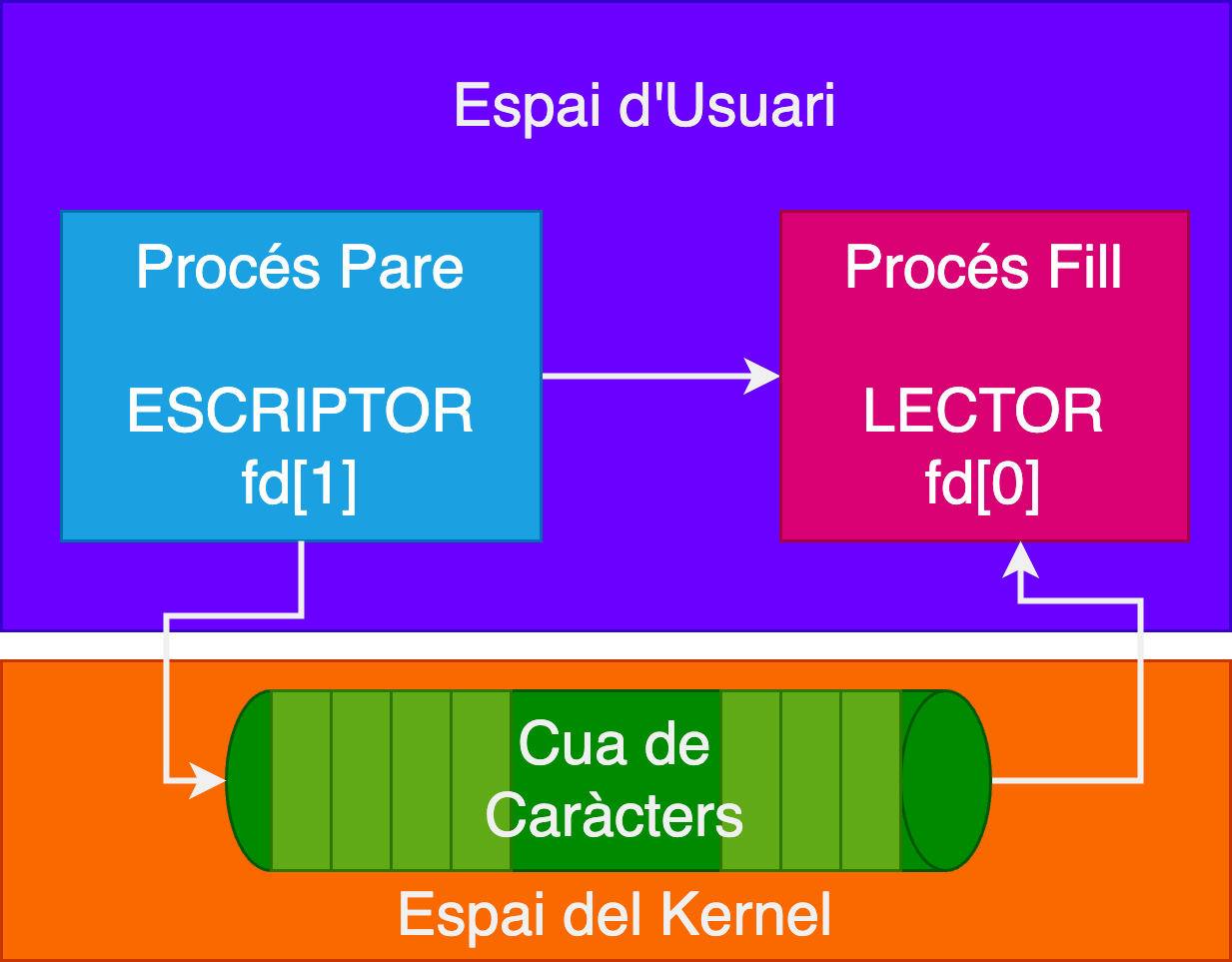
Exemple: Comunicació amb pipes (C)
int pipe_fd[2];
pipe(pipe_fd);
if (fork() == 0) { // Fill (lector)
close(pipe_fd[1]);
char buffer[100];
read(pipe_fd[0], buffer, 100);
close(pipe_fd[0]);
printf("Missatge rebut: %s\n", buffer);
} else { // Pare (escriptor)
close(pipe_fd[0]);
write(pipe_fd[1],
"Missatge des de Process pare",
strlen("Missatge des de Process pare")
);
close(pipe_fd[1]);
}
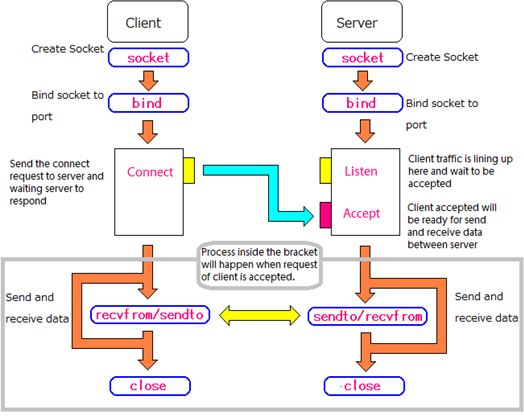
Exemple: Comunicació amb Sockets
Això és tot per avui
TAKE HOME MESSAGE
La comunicació entre processos és essencial per a la coordinació i sincronització en sistemes operatius multiprogramats o distribuïts. Hi ha diversos mecanismes de comunicació, cadascun amb les seves pròpies característiques, avantatges i limitacions. La selecció del mecanisme adequat depèn de les necessitats específiques de l’aplicació, com la velocitat, la complexitat i l’escala de la comunicació requerida.

